Navigation and Efficiency in AMRs and AGVs
At first glance, high-capacity Autonomous Mobile Robots (AMRs) and Automated Guided Vehicles (AGVs) perform similar tasks. That is, AMRs and AGV robots are capable of moving pallets and heavy payloads long distances. However, a robot is only as good as the efficiency gains it provides your organization. It turns out that it’s not what the robot does that matters, but how. Since navigation is the biggest factor affecting your solutions’ efficiency, we will take a closer look at what goes into it.
The three distinguishing navigation features that help achieve greater efficiencies are: obstacle avoidance, localization, and pallet handling. A combination of these features makes the AMR smarter, more flexible, and more efficient than traditional AGV robots, and free workers to do their jobs without distraction. In this article, we will take a closer look at localization.
What is Localization?
First, let’s define our terms. Navigation is the ability to get to the right destination (or destinations) at the right time. Think about your last trip to your favorite home improvement store. You use navigation to get from the front door to the plumbing department and back to check out. Localization is the robot’s ability to know where it is in space, usually based on landmarks. Traditional AGVs, Advanced AGVs, and AMRs all localize in different ways, resulting in different levels of efficiency. Let’s get into it.
Natural Feature Localization
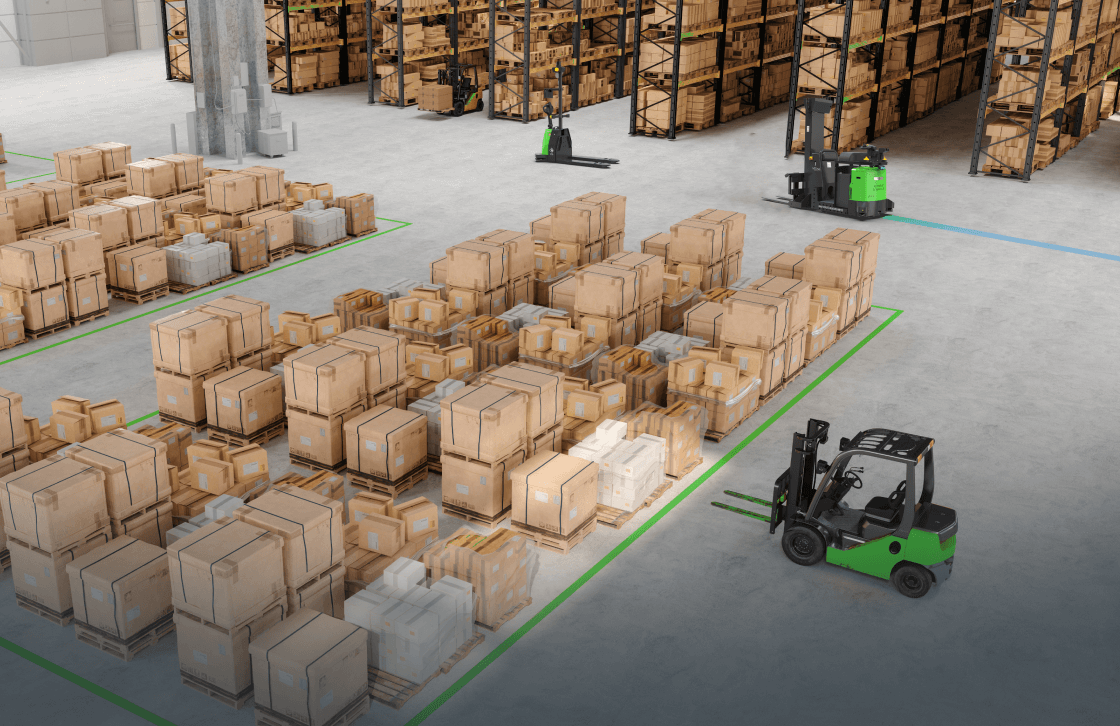
Traditional AGVs require reflectors or mirrors for localization, meaning additional infrastructure is required to install these self-driving forklifts. Advanced AGVs use what’s referred to as natural features for localization. Natural features are static things in the environment, like racking, walls, or pillars. With either Traditional AGVs or Advanced AGVs, both methods require the landmark to be visible and exactly the same. The reason is because AGVs need to know they are precisely on the right path. If the AGV cannot localize, the robot will stop and require manual intervention to get it started again. Once an AGV leaves its path, it has no way to get back on route.
Natural Feature Localization paired with Path Planning
AMRs use natural feature localization, as well, but when paired with path planning as explained in our blog post on Obstacle Avoidance, they are much more robust to changes in their environment. When an AMR strays from the desired path, it can confidently use path planning and obstacle avoidance to move safely forward, avoid people and obstacles and get back on path. This approach saves both travel time, and the time that workers are required to help a lost AGV find its way.
Vecna Robotics has developed its localization is based on something similar to how a human localizes. The AMR just need to make progress down the aisle, but it doesn’t have to know precise measurements. Think about it. If you’re moving from your living room to the kitchen to get a glass of water, you don’t need to know in fractions of an inch how far you have to walk. All you need to know is roughly how to get there. Thus, the AMR moves from one area to another in a more natural way without requiring precise localization all the time.
Now, when you arrive in the kitchen, you do need to know precisely where the glass of water is in order to pick it up. Similarly, when an AMR is ready to dock to a pallet or conveyor, it localizes more precisely.
The benefit to this method is that AMRs are more flexible to changes in their environment. An AGV expects that a warehouse will remain exactly the same as it was when it was first mapped. Because the environment is constantly in flux, performance will gradually become worse and worse over time. An AMR that relies on a combination of smart localization and obstacle avoidance will never degrade in performance – and in fact, has the potential to improve over time.
The Benefits of AMRs over AGV Robots
Autonomous Mobile Robots, like self-driving tuggers, fork trucks, and pallet trucks, apply natural feature localization in a way that maximizes efficiency. Moreover, when paired with path planning, AMRs are more robust to changing environments and workflows, and require less support from workers. Thus, all resources can continue carrying out their work with as little interruption as possible.
For more about the differences between AMRs, AGVs, and VGVs, download the white paper.